PX4
Download UAVLAS software and firmware
It is recommended to download the latest version of the ULSTools software (See download page for details) It is recommended to connect all sensor to the PC and update the firmware for all UAVLAS devices in the system. (See ULSTools page for details)
Transmitter Configuration
Configure UAVLAS transmitter See transmitter installation for details
Receiver Configuration
Connect the system using UART interface.
Configure UAVLAS receiver See receiver integration section for details
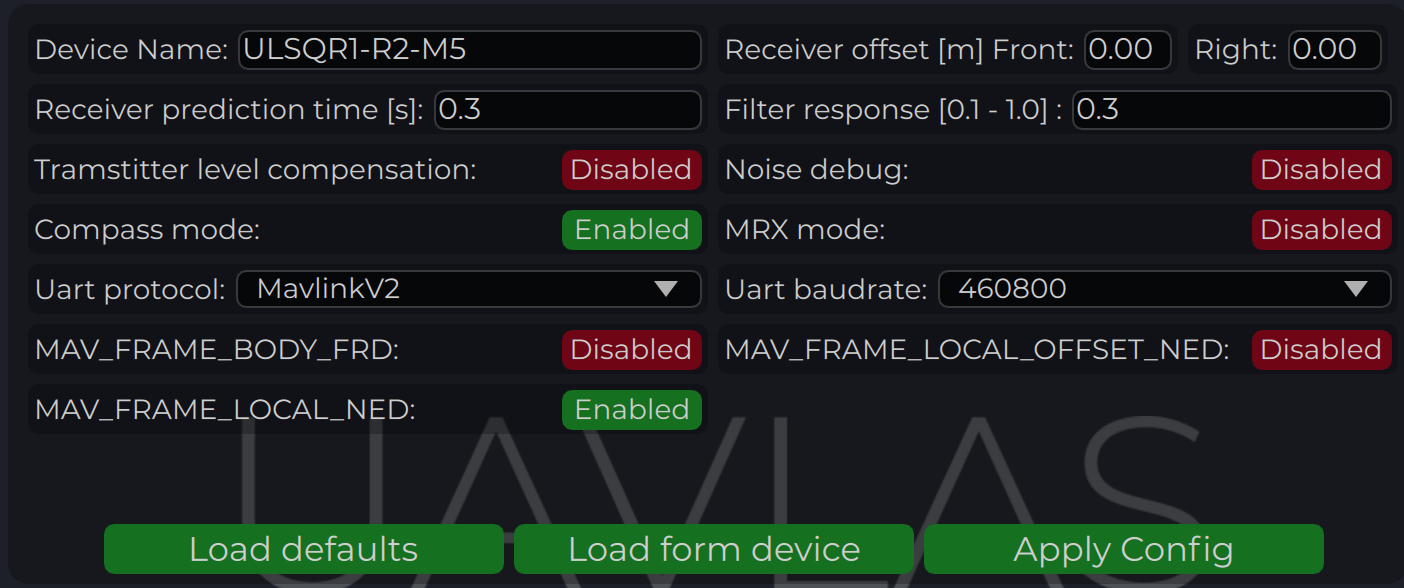
Current version of the system can use MavlinkV2 protocol to communicate with PX4 autopilots (for now it supports MAV_FRAME_LOCAL_NED).
Example of receiver configuration:
Download Firmware for PX4
UAVLAS device is working using a standard Mavlink messages protocol.
But in PX4 v1.13 and lower there are some issues related to precision landing capability, so it is required to flash the patched firmware file.
Important
Custom firmware for PX4 stock is only required if you prefer to use versions below 1.14. Otherwise, use the official PX4 firmware. Custom PX4 builds for UAVLAS system will be deprecated soon. Please note that PX4 version v1.14.0-beta2 is currently available for testing, which is fully compatible with ULS-XCOPTER, we recommend that you use it for your tests. See PX4 Github repo.Download firmware binary files (based on V1.13.2)
or, for developing and building custom platforms, refer to source based on the current version of the PX4 project.
Clone modified version of PX4 stack
Before building, switch to uls-alpha branch.
Configure PX4 autopilot.
Values are provided as example (in our case, Pixhawk4-mini AP)
| PX4 Parameter | Value |
|---|---|
| MAV_1_CONFIG | TELEM/SERIAL4 (require reboot to set next params) |
| MAV_1_FORWARD | Enabled. |
| MAV_1_MODE | Onboard. |
| SER_TEL4_BAUD | 460800_8N1 (It needs to be corresponding to the setting of UART in Receiver ULS-QR1-R1 connected to PX4 AP) |
Running and testing
After configuration and wiring, power up drone and transmitter. On QGround control, go “Analyze Tools” -> MAVLINK Inspector. Check LANDING_TARGET MAVLINK message
IMPORTANT:
LANDING_TARGET may be unavailable in case of connection over USB. So, use telemetry channel (uart modem etc.) to connect drone to the QGroundControl.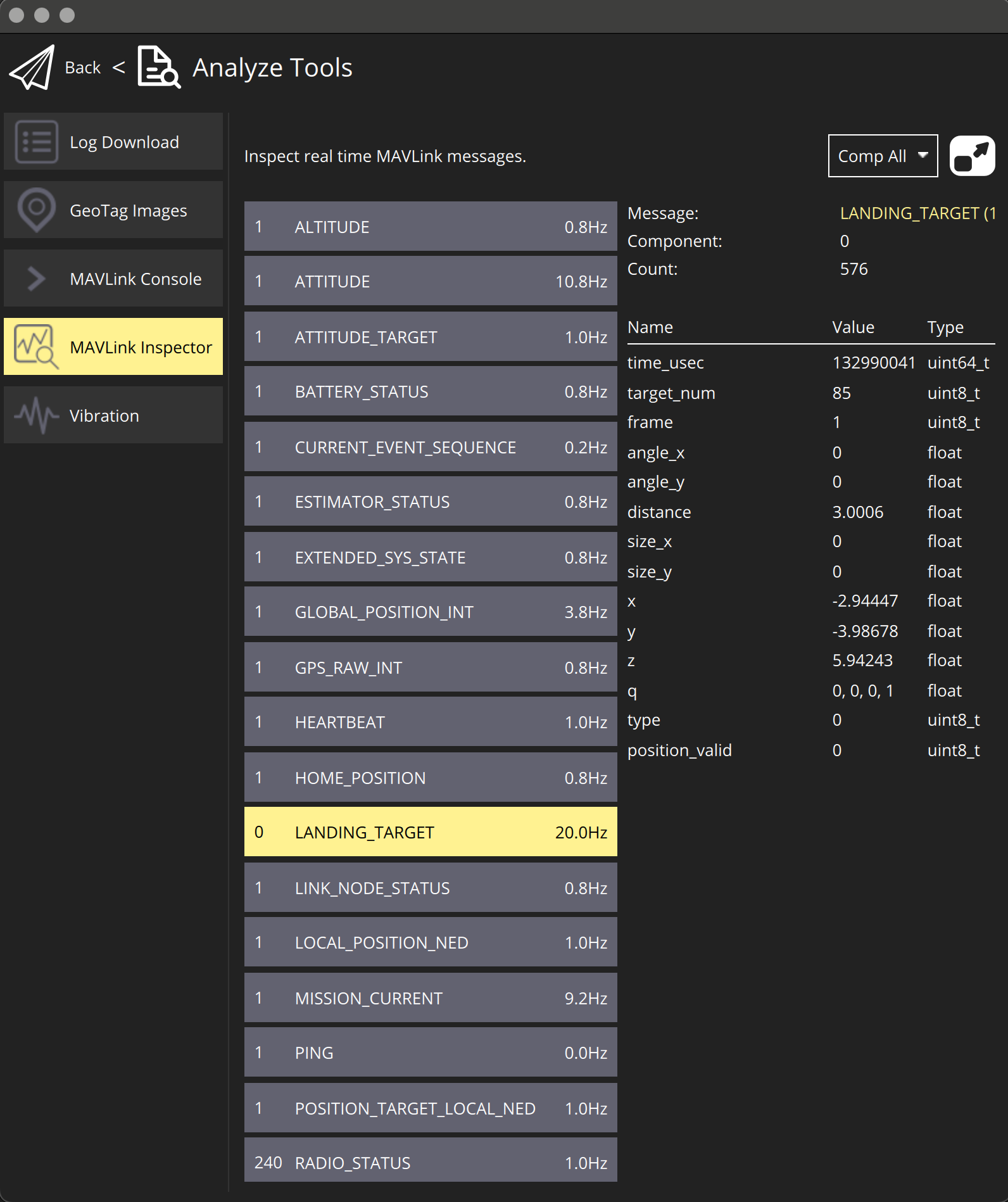
In case the vehicle provide LOCAL_POSITION_NED message to UAVLAS system, and it hovers over beacon, you get “position_valid = 1” in LANDING_TARGET
To perform precision landing, you need to create a flight plan and enable Precision Landing option on the landing point.
Have a good flights !
Feedback
Was this page helpful?
Glad to hear it! Please tell us how we can improve this page !
Sorry to hear that. Please tell us how we can improve it !